
- /
- /
Getting Started Guide: RTCM Base Station
Overview
This guide is intended for first time RTCM Base Station users and provides an overview of how to handle with the required software, connect to and configure the RTCM Base Station.
Content
Powering RTCM Base Station
The RTCM Base Station can be powered with standard 230V AC-Voltage plug or with standard USB (Typ-C connector, e.g. 5V USB powerbank).
Connecting the RTCM Base Station
FIgure 1 shows the standard connections for the typical RTCM Base Station setup:
* Please connect the GNSS antenna with the marked SMA connector to the RTCM Base Station. The GNSS antenna must stay outside with open-sky environment (see figure 2).
* Please connect the Wi-Fi antenna with the marked SMA connector to the RTCM Base Station.
* Bring your RTCM Base Station to the internet. For this, please connect the station to a router or screw on the 4G antenne. Further instructions and other connection possibilities are given in article Publishing RTCM-Data for MSRTK Modules

Fig. 1: RTCM Base Station connections
Recommendation: The GNSS antenna should be fixed mounted on position outside with best possible satellite visibility (see figure 2). A recommended place would be the roof of a high building or similar places. The correction data of the RTCM Base Station are highly accurate for rovers with a distance of up to 15 km. So it makes sense to fix the RTCM Base Station on a location where you can calibrate the position once a time and don’t change the position again.

Fig. 2: RTCM GNSS antenna placement guideline
The ANavS® Wizard to configure the RTCM Base Station
For a precise absolute/relative position solution for your RTCM Base Station, you need a one-time calibration before using the RTCM Base Station. The ANavS® Wizard includes this functionality with the following steps. To do the calibration steps, please connect to the WiFi Access-Point “ANavS_RTCM_AP” (Password: anavsrtk) of the RTCM Base Station.
Figure 3 shows Step 1 of the ANavS® Wizard for RTCM Base Station calibration:
Please select the option “CALIBRATE ANavS RTCM Base Station”.

Fig. 3: Select the desired Modus (1. Step)
Figure 4 shows Step 2 of the ANavS® Wizard for RTCM base station calibration:
Configure your Wi-Fi and 4G settings of the RTCM base station in this step.
For normal use cases, there is no need to change settings in this window. The Wi-Fi setting in delivery status is Access-Point (AP). The 4G setting in delivery status is working with the already equiped SIM-Card (APN: em, Dial-UP: T*99#) and has internet connection through this.
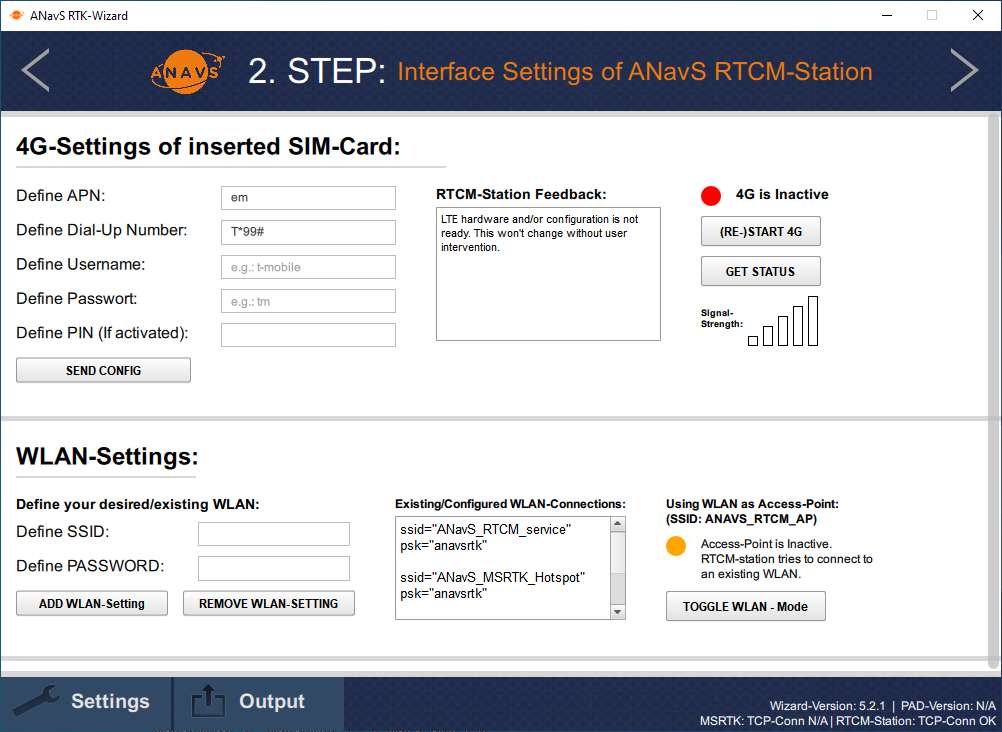
Fig. 4: WLAN and 4G settings of RTCM station (Step 2)
Figure 5 shows Step 3 of the ANavS® Wizard for RTCM Base Station calibration:
Your Laptop/PC is streaming sensor data of the RTCM Base Station to recognize GNSS antenna connection.
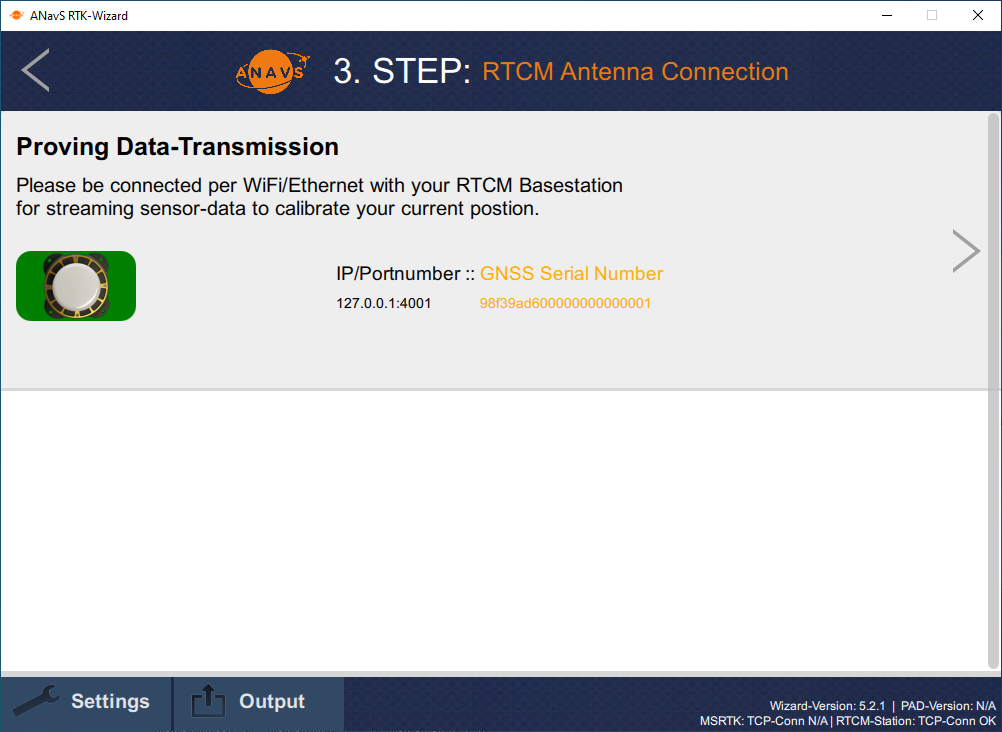
Fig. 5: Checking GNSS antenna connection (Step 3)
Figure 6 shows Step 4 of the ANavS® Wizard for RTCM Base Station calibration:
The user has two options for calibrating the stationary position of the RTCM Base Station:
* NTRIP-Client Connection: Use this option to calibrate your RTCM Base Station with centimeter-accurate position. To do this, you need an external RTCM input-stream from an appropriate correction-data service-provider with centimeter accuracy. Depending on your service-level, ANavS® can do this also for you. The advantage of this mode is a precise relative and absolute position estimation of your rover equipt with MSRTK Module and ANavS® sensor fusion.
NOTE: To stream the correction data from external service provider, your RTCM Basestation needs internet access (through its integrated 4G module or ethernet-connection).
* Filtered Least-Squares Position-Solution: This is the standard way to calibrate a rough position estimation for the RTCM Base Station. You can do this without the need of additional services. It has no influence on the accuracy of the relative position-solution between rover (MSRTK Module) and RTCM Base Station, but the absolute position includes an position-offset depending on the accuracy of the position of the RTCM base station.
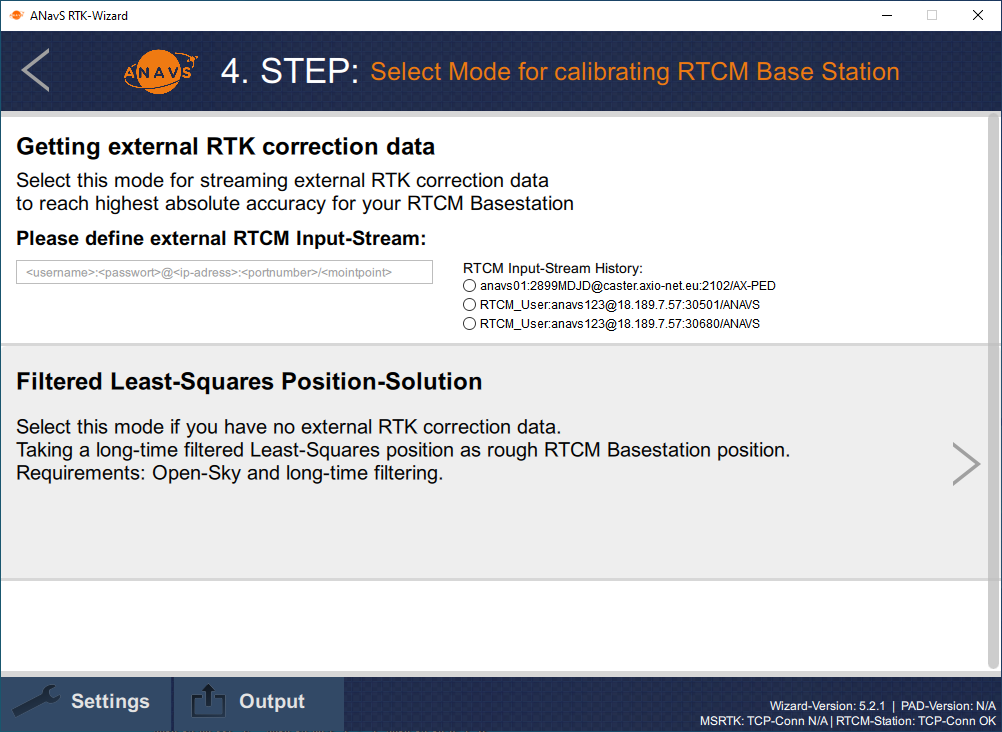
Fig. 6: Select Modus for RTCM Base Station calibration (Step 4)
Figure 7 shows Step 5 of the ANavS® Wizard for RTCM Base Station calibration. After starting the software, the ANavS® Wizard is streaming GNSS sensor data from the ANavS® RTCM Base Station (and optional correction-data from an external service-provider over internet). With this GNSS data, the RTCM station tries to calibrate its current position. Please observe the delivered output to see the current status and accuracy of the calibration process. After reaching some lower bounds, the calibration stops and the position is stored on the RTCM station (also after reboot of the system).
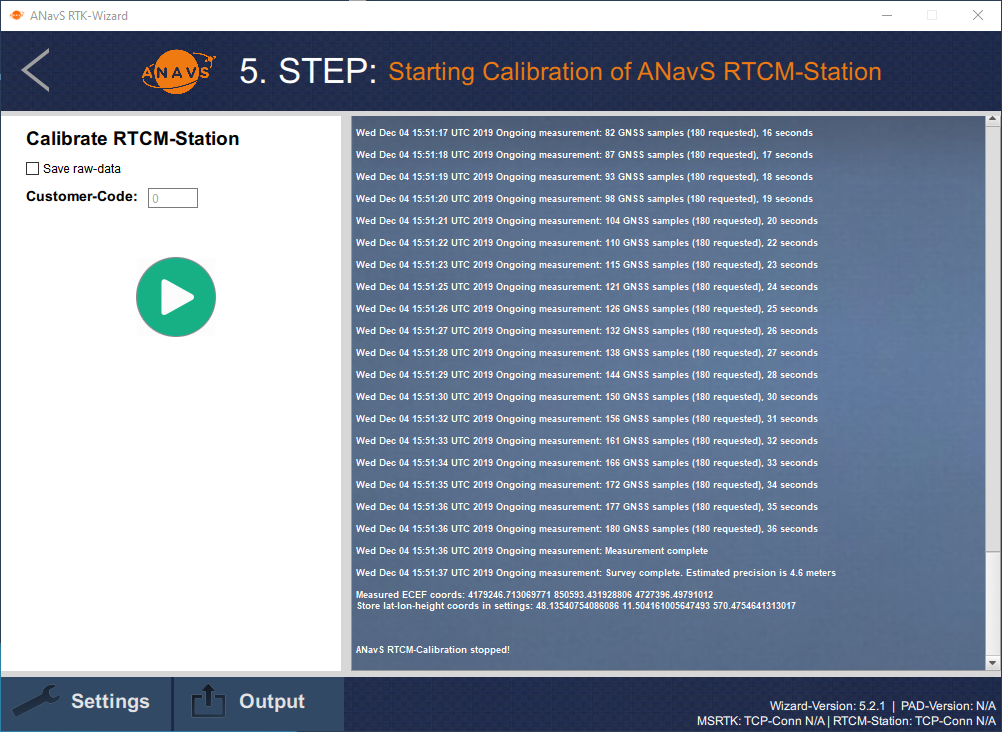
Fig. 7: Calibrate your RTCM Reference Station (Step 5)
To receive RTK correction data from your RTCM base station one could use the own local network or our cloud based correction data service.
For more information, please see also the article Broadcasting RTCM-Data for MSRTK Modules.
An Example of a defined RTCM-stream with our ANavS cloud based correction data service would be:
Username: RTCM_User
Password: anavs123
IP: customer-specific; info is included in the system delivery
Port: customer-specific; info is included in the system delivery
This results in the following NTRIP input stream for your MSRTK Board:
RTCM_User: anavs123@<customer-specific-IP>:<customer-specific-Port>/ANAVS